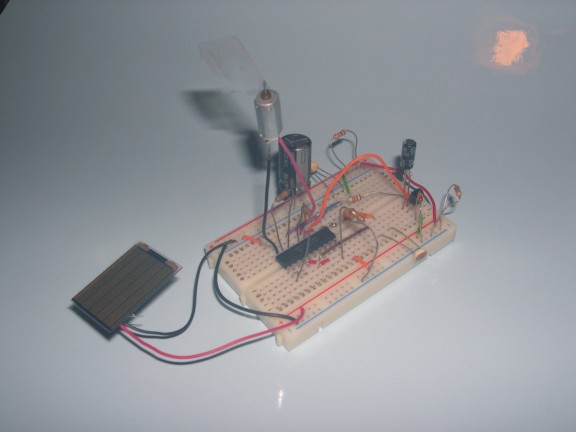
This is the Bi-sEyemet 1c circuit put together by Wilf Ritger
my breadboarded circuit is using LDR's instead of photodiodes
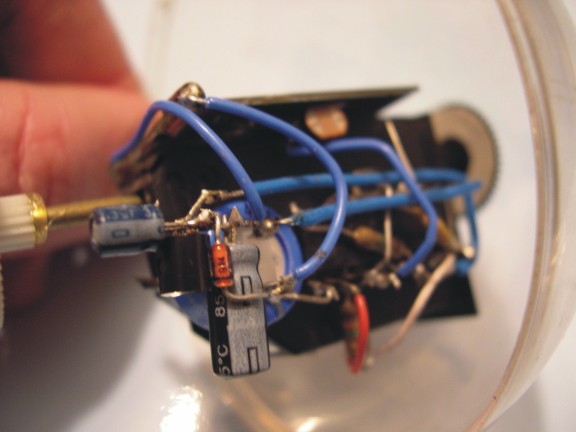
Heres the freeformed circuit hotglued to the backside of
the gearmotor
and yes thats two timing caps on the miller SE so that I could drain more
power from
the main cap before resetting I may add another before
rebuilding the gearmotor
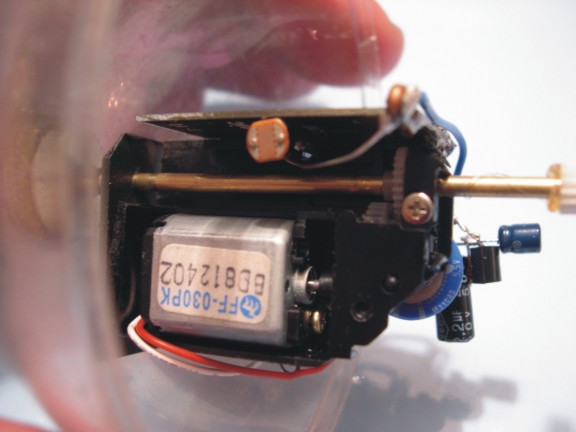
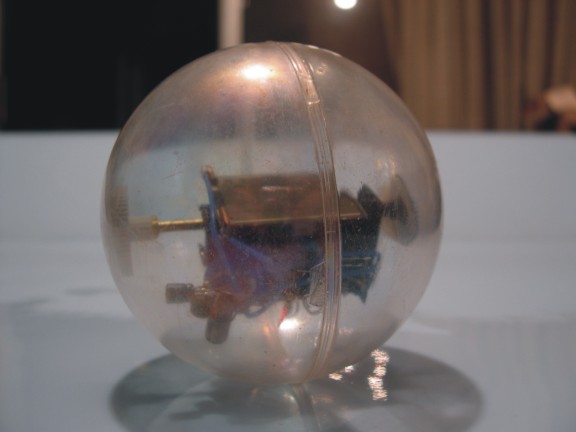
Heres the gearmotor side. It's a CD laser head drive with
the
screw removed and replaced with a piece of brass tubing
press fit into the final drive gear, and then all unnecessary
plastc trimmed away.
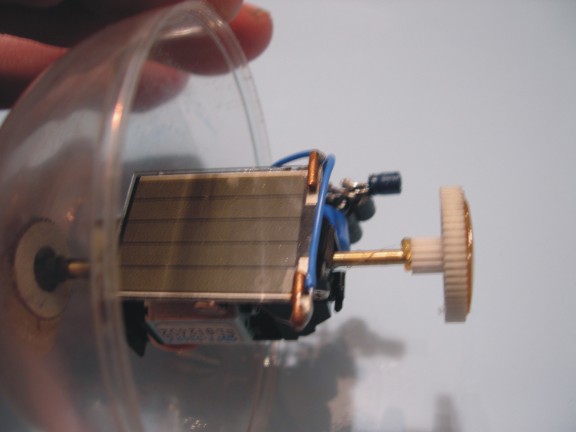
Cassette gears glued to the ends of the shaft and then glued to the ball

But as you can see here its unbalanced in two directions
so
movement is really hampered
This bot moves at its best about 1 inch and usually much less

So major improvements will be rebalancing and then possibly
a new gearmotor
as this one does not have enough torque to spin the whole affair around the
axel but this may be partially due to its being off center