Ezekial 2.0

Chassis was drawn in CorelDraw, printed then glued to some
6mm sintra
and cutout on my tablesaw and shaped using the bandsaw, scrollsaw, and sander.

Way too wide and the hips need a bit more rigidity
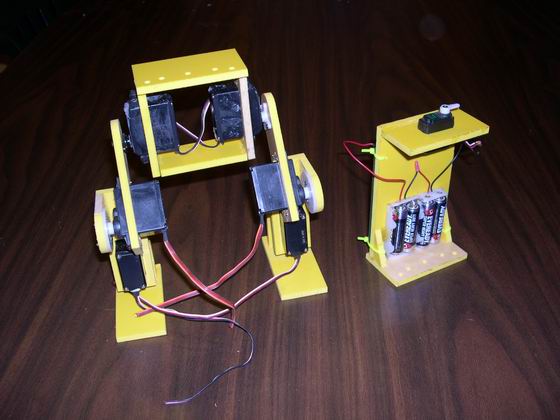
Narrowed up and some more support
Still too wide the ankle servos wont have enough torque to lift the bot side to side

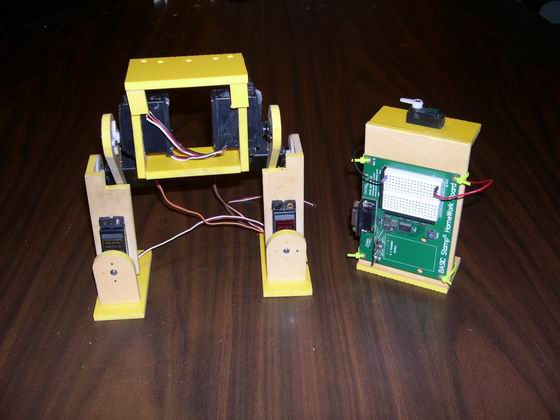
Here I swapped legs to get the feet closer together
still too wide

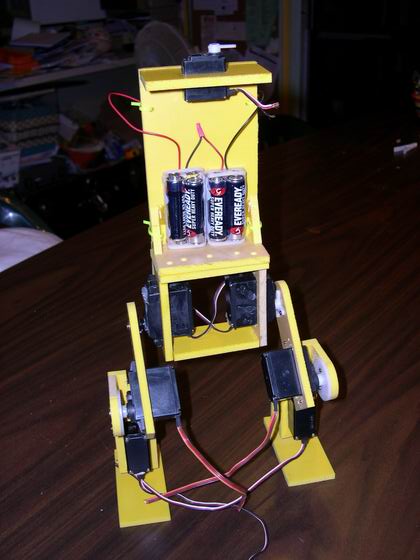
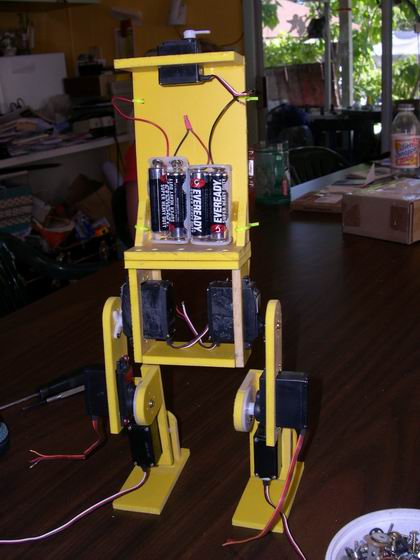
Narrower yet (the hip servos almost touching) and the
feet have been widened to give a little more leverage.

I'm using a Lynxmotion ssc12 (discontinued) Loaned to me
by John Olson and the parallax homework board from my toddler
robot experiment (ezekial)
The servo controller is made by Scott Edwards electronics
and still available.
http://www.seetron.com/ssc.htm
Ezekial video
click and save as